


�п�Ժһ���о� | �������ڵ��˻�Эͬװ��������̬���Ʒ�������ѧ�������ṩ�߾���������̬��ֵ��֤
�����
�ڹ�ҵ�˻�Эͬװ�䳡���У��ڵ�����Ӱ��������̬���Ƶ�ȷ�ԡ��㽭��ѧ��е����ѧԺ�о��Ŷ����п�Ժһ���ڿ� Robotics and Computer-Integrated Manufacturing �����о������һ�������ڵ��˻�Э���������Ӿ�-�����ں�������̬���Ʒ������о��У�NOKOV ������ѧ������ϵͳ�ṩ�߾���������̬��ֵ���ݣ�������֤��������ʵװ�价���µ���Ч����³���ԡ�
һ���˻�Эͬװ���еĺ�����ս���ڵ��µ�������̬����
���˻�Э����HRC��װ������У��������������Ա������Эͬ��ҵ�����峣���豸����װ���е�۲����ڵ������´�ͳ�����Ӿ���������̬���ƣ�HPE�����������½���
����ڵ��˻�Эͬװ�䳡���е�������̬�������⣬�㽭��ѧ�о��Ŷ��Թ�ҵ������ʵ����Ϊ������̽������³������ɲ����ԵĽ��������
�����Ӿ�-�����ںϵ�������̬���Ʒ������
1.�Ӿ�-IMU �ںϵ�������̬���ƿ��
�������һ�ֻ����Ӿ�-�����ںϵ�������̬���Ʒ������Ե��� RGB �����ϡ�� IMUs ��Ϊ���룬�ڱ�֤���ƾ��ȵ�ͬʱ��˲�����Ա�������ԡ�
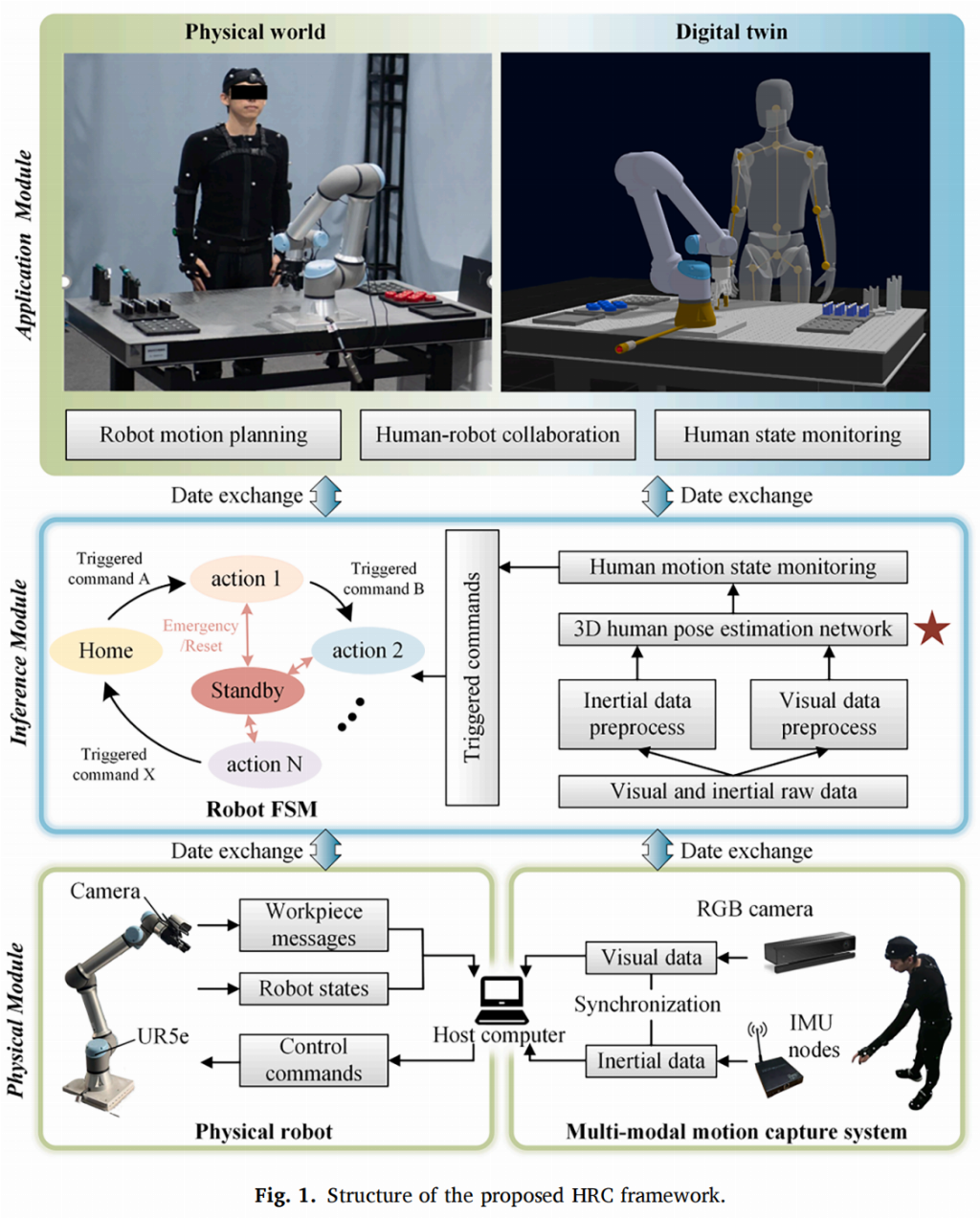
�˻�Э����ܽṹ
�÷���ͨ����ģ̬���ݻ�������Ч�����Ӿ��ڵ�������ؼ���ʶ�������Ӱ�졣
2.��ģ̬�任���ںϿ����
�о���һ�������һ�ֻ����ض���λ�Ŀ�ģ̬�任���ں�ģ�飬�������ϲ�ͬģ̬�µ�����ռ���������ǿ�Ӿ��������Ϣ֮���Эͬ����������
����ʵ����֤���������ݼ�����ʵװ�䳡������
�ڵ�װ�䳡���µ�ʵ����֤���

�˻�Эͬ����ҵ HRC װ������������ͼ
�о��������������ݼ���һ���ϳ��ڵ����ݼ����Լ��Խ����˻�Эͬװ�� HPE ���ݼ��Ͻ�����ϵͳʵ�顣
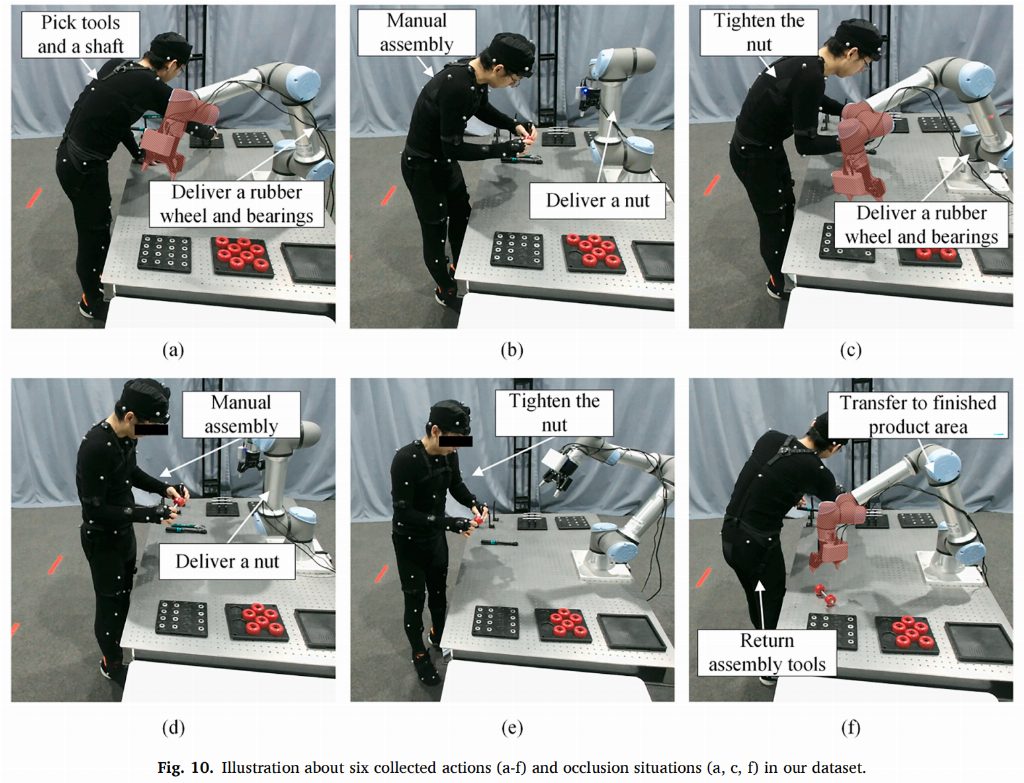
չʾ�����ݼ��е������ռ�������a-f�����ڵ������a��c��f��
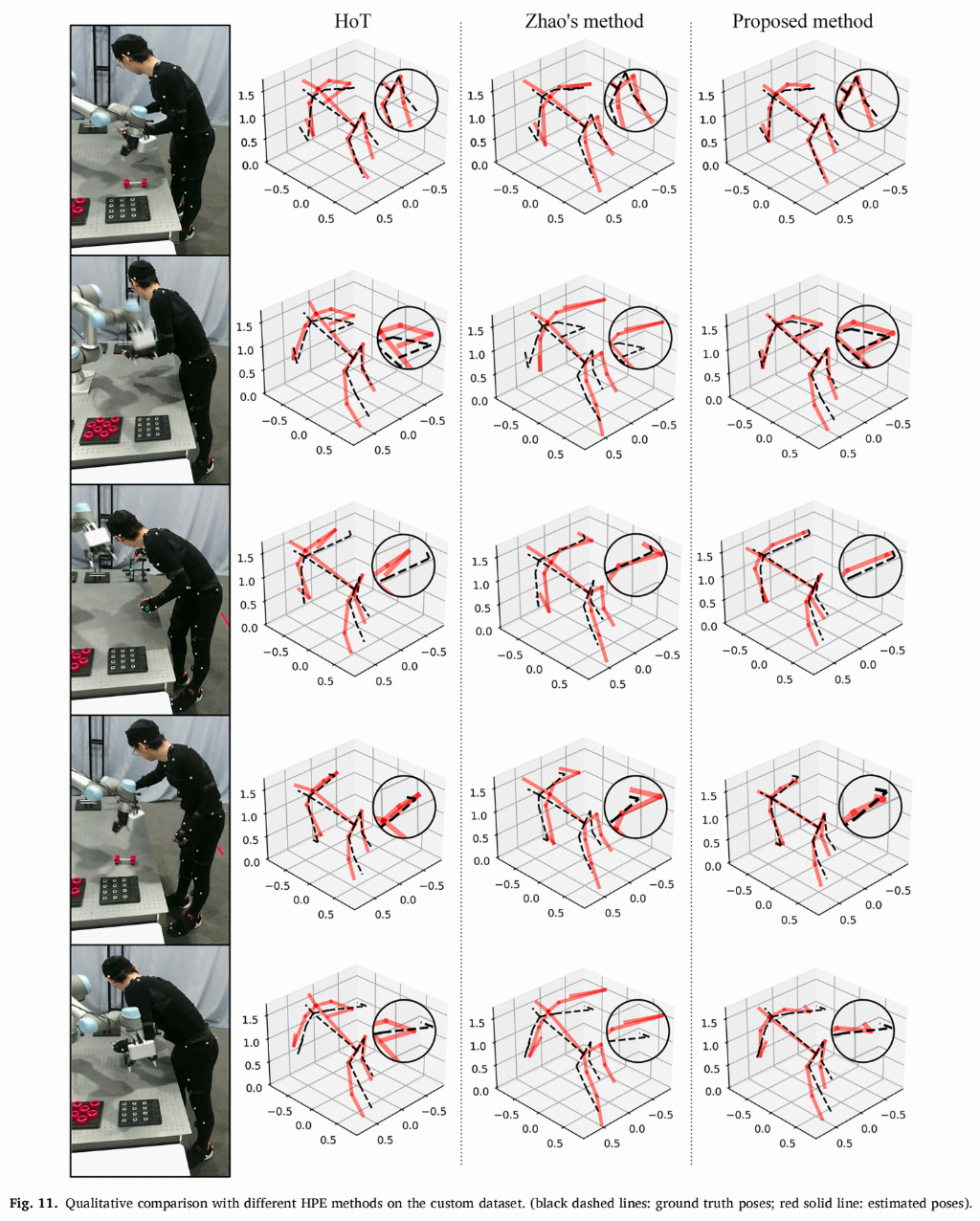
�벻ͬ HPE �������Զ������ݼ��ϵĶ��ԱȽϡ�����ɫ���ߣ���ʵ��̬����ɫʵ�ߣ�������̬����
���Զ������ݼ��У�NOKOV ����������ϵͳ���ڲɼ�������Ƶ��IMU ������ 3D ������̬��ֵ������ʵ�����ݣ���������÷������ڵ�������չ�ֳ����ߵĹ��ƾ�����³���ԡ�
�ġ�NOKOV��������������̬����ʵ���еĹؼ�����
���ڹ�ѧ�������ĸ߾�����̬��ֵ��ȡ
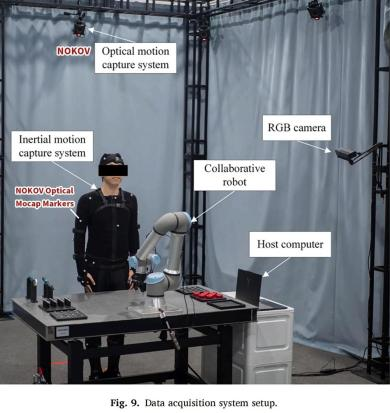
�˻�Э��ʵ�����ݲɼ�ϵͳ���ã�NOKOV������ѧ������ϵͳ
��ʵ����֤�Σ��о��Ŷ�ʹ�� NOKOV ������ѧ������ϵͳ ��ȡ�߾���������ά��̬��ֵ���ݣ������������᷽���ڲ�ͬ�ڵ������µ�������̬���ƾ��ȡ�
NOKOV����������ϵͳ�����·��淢�ӹؼ����ã�
�ṩ�Ǻ������ȵ�������̬��ֵ
֧�Ŷ�ģ̬������̬���Ʒ����Ķ�������
��֤�Ӿ�-�����ںϷ�������ʵװ�䳡���еĿɿ���
�塢�˻�Эͬ�����У��ڵ�������������̬���Ʒ���FAQ
Q1���ڵ����������ʵ�ָ߾���������̬���ƣ�
A1�����ڵ����ص��˻�Эͬװ�䳡���У�ͨ���ں��Ӿ���Ϣ����Դ��������ݽ���������̬���ƣ�����Ϲ�ѧ������ϵͳ�ṩ�ĸ߾�����̬��ֵ������֤���������������ƽ����³������ȷ�ԡ�
Q2����ѧ��������������̬�����о�����ʲô���ã�
A2����ѧ������ϵͳ�� NOKOV����������ϵͳ���ṩ�߾�����ά��̬��ֵ����Ϊ��֤����������̬���Ʒ����Ļ��ֶΡ�
Q3���Ӿ�-�����ں���������̬�����е�������ʲô��
A3���Ӿ�-�����ںϵ�������̬���Ʒ����ܹ��ڵ�Ŀ�Ӿ������ڵ�ʱ������ IMU ���ݲ��������˶���Ϣ���Ӷ��ڱ�֤ϵͳ�ɲ����Ե�ͬʱ�����̬�����ȶ��ԡ�
Q4��������̬���Ʒ���ͨ����ν��о�����֤��
A4��������̬���Ʒ����ľ���ͨ��ͨ����ѧ������ϵͳ��ȡ����ά������̬��ֵ�����������÷�ʽ�ѳ�Ϊ��֤��ҵ�˻�Э���븴��װ�䳡�����㷨���ܵĿɿ��ֶΡ�
�������ļ������
���о��ɹ�“A deep learning-enabled visual-inertial fusion method for human pose estimation in occluded human-robot collaborative assembly scenarios” �������п�Ժһ���ڿ� Robotics and Computer-Integrated Manufacturing�������Ŷ������㽭��ѧ���նɴ�ѧ�����ʼ�����ѧԺ�ȹ��ʶ���������
�����
���ش壨ͨѶ���ߣ����㽭��ѧ��е����ѧԺ��Ժ�������˼ƻ��о�Ա����ʿ����ʦ��
�δʣ��㽭��ѧ��е����ѧԺ��ʿ�о�����
������նɴ�ѧ���̼���ѧԺ�������ڣ�
�ܻ�ӱ���㽭��ѧ��е����ѧԺ��ʿ�о�����
��£��й�����ԺԺʿ���㽭��ѧ��ѧ�����Ρ���е����ѧԺ���ڡ���ʿ����ʦ��
�����������ô�ԺԺʿ�����ʼ�����ѧԺ�ɳ�������ѧ���ڼ�ϵ���Ρ�
���о�Ϊ�˻�Эͬװ���е�������̬���������ṩ�˿���صļ���·����Ҳչʾ��NOKOV ����������ϵͳ�ڸ߶˻����������������о��е���ֵ֧��������
���������Ľ����������߸��˹۵�,����������վ��ͬ�Ͷ�����ʵ�Ը������漰�����������






