

天津理工大学机械工程学院团队研究新型双支链四自由度高速低振分拣并联机器人
在当今全球工业自动化和智能化的浪潮中,中国的工业机器人产业正在经历一场技术革命。由马跃副教授领导的研发团队,在李长芮,席曼茹,赵岩森,郝佳伟等团队成员的共同努力下成功研发了一种高速低振分拣并联机器人,其创新研发一款拥有自主知识产权的新构型机器人,同时解决其高速高加速运动下末端振动的难题。

该团队针对现有市场传统Delta构型并联机器人实现了机器人拓扑结构创新,该机器人采用了独特的双支链四自由度设计,该设计使机器人结构简单且紧凑,实现了三维平动与一维转动的运动能力,较传统三自由度机器人灵活性更强,应用更广。其特殊的高刚度并联结构设计可在高速运行下显著提高末端稳定性。此外,针对现有市场机器人设计理论模糊,该项目通过数字化尺度-结构-驱动器参数集成优化设计来提升机器人的综合性能,使这款机器人在结构简单性、环境适应能力以及操作灵活性方面表现更为出色。同时团队针对不同应用场景研发了轻量化大空间的第一代产品与高刚度大负载的第二代产品。

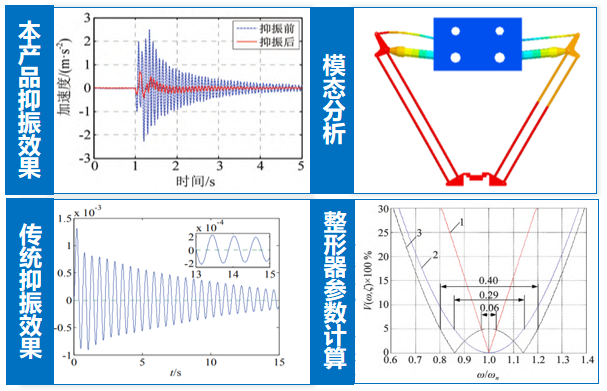
团队不仅在机器人机构上实现创新,而且解决了高速高加速运动下机器人末端振动的问题,显著减少了末端执行器的残余振动。针对末端振动问题,项目研发基于输入整形技术的抑振算法,实现了全工作空间域任意点的稳定性。
项目团队针对当前市场上高速并联机器人设计、控制及应用难题,如末端振动、高成本及人因工程问题提出了有效的解决方案。他们不仅关注产品的技术创新,还致力于推动整个产业链的发展,包括与辰星(天津)自动化设备有限公司的合作,共同探索市场应用和人才培养的可能性。高速并联机器人将激活轻工业经济,促进行良性竞争,项目团队亦将持续新型研究。睿驰疾手将触达汽车、物流、控制等,持续拓宽领域,速度、精度、抑振技术深度。
声明:本文仅代表发布者个人观点,并不代表本站赞同和对其真实性负责,如涉及交易请谨慎。