


水下仿生机器人推进机构如何进行实验验证?基于水下动作捕捉的研究实践 | 东北大学
水下仿生机器人推进研究背景与实验目标
随着水下机器人应用场景的不断拓展,推进效率与运动稳定性成为水下仿生机器人研究中的关键挑战。基于自然生物推进方式的仿生设计,东北大学储逸尘分别以牛蛙后肢和牛鼻鲼胸鳍为仿生对象,提出两种水下仿生机器人推进新方法,成功设计并验证了两种多连杆仿生推进机构。
在上述水下仿生机器人实验研究中,NOKOV 度量动作捕捉系统用于获取真实生物及仿生机构在水下环境中的运动学数据,为模型分析与实验验证提供数据支持。
基于牛蛙后肢的仿生水下推进机构实验验证
研究以牛蛙后肢运动机制为仿生原型,提出并实现了一种水下仿生机器人推进系统设计方案。该系统采用三阶段四连杆机构模拟牛蛙“踢腿—恢复”运动,通过单电机驱动实现周期性推进。
1.通过动作捕捉系统获取真实牛蛙后肢运动学数据
在实验过程中,研究人员使用 NOKOV 度量水下动作捕捉系统 获取真实牛蛙后肢在推进与回收阶段的运动学数据,分析大腿、小腿及蹼足在不同阶段的角度变化规律,并据此设计仿生后肢结构。
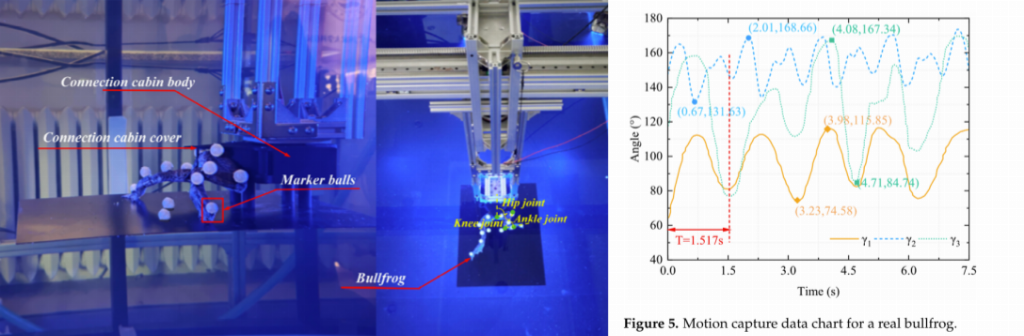
图1.通过NOKOV水下动作捕捉系统获取牛蛙后肢运动学数据
2.通过动作捕捉系统对仿生机构运动数据测量并与真蛙数据对比
在仿真与实物实验阶段,研究同样借助 NOKOV 度量动作捕捉系统 测量仿生后肢的实际运动角度。实验结果表明,仿生机构与真实牛蛙后肢的运动趋势高度一致,蹼足运动吻合度达到 98.5%。
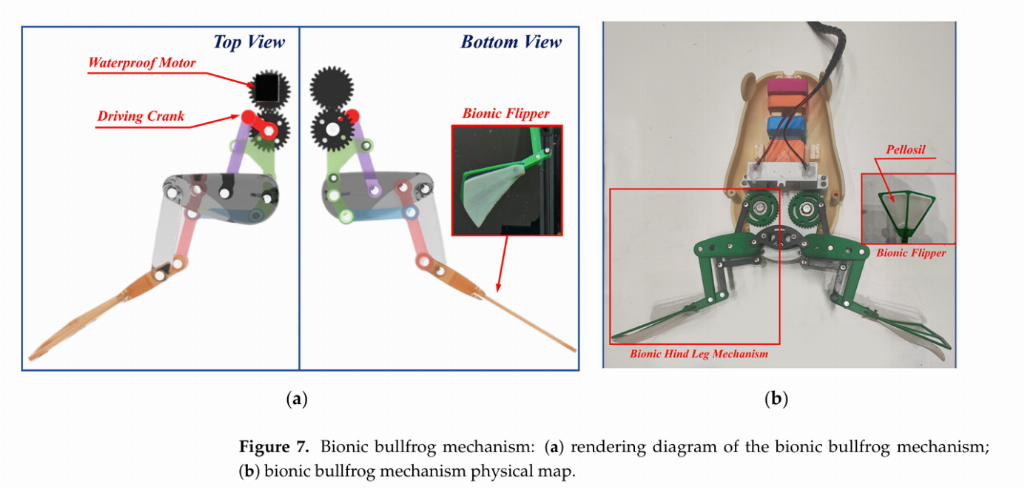
图2.仿生牛蛙机制
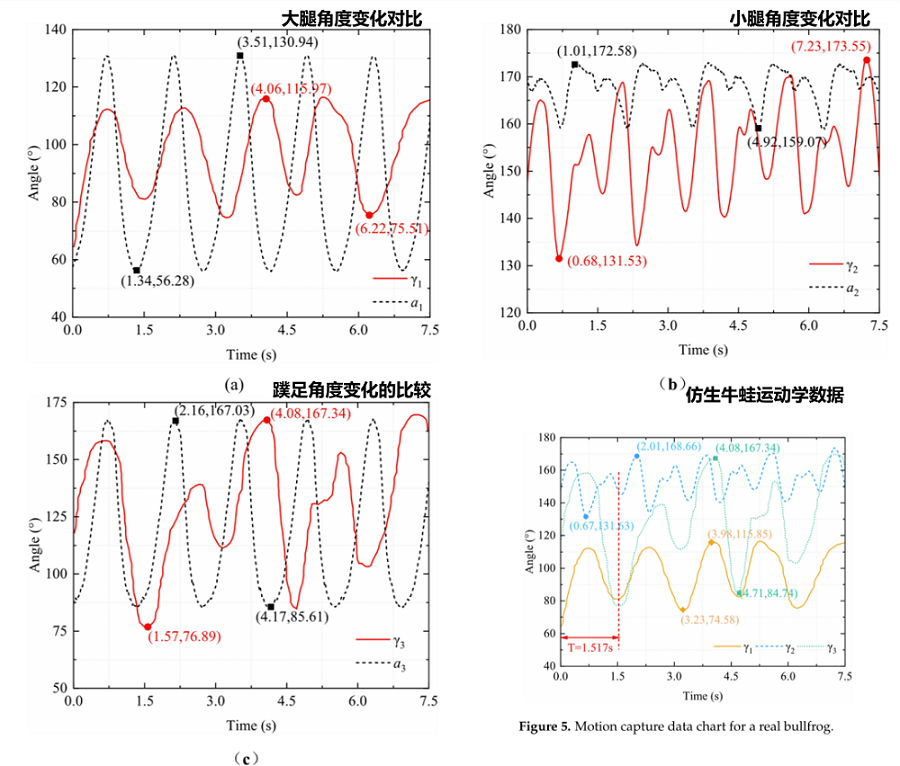
图3.图(a)(b)(c)为真蛙与仿生蛙后肢运动捕捉数据对比,Figure 5.展示仿生蛙后肢运动捕捉数据
水下六自由度力实验显示,该水下仿生推进系统在 9V 电压驱动下平均推力为 2.65N,峰值瞬时推力可达 7.91N,验证了该水下仿生机器人推进机构的实际性。
基于牛鼻鲼胸鳍的六连杆水下仿生机器人实验验证
除牛蛙后肢外,牛鼻鲼胸鳍拍动推进也是一种典型的高效水下仿生原型。围绕中位鳍与对鳍(MPF)推进方式,研究团队提出了一种基于瓦特型六连杆机构的水下仿生机器人设计方案。
1. 仿生牛鼻鲼胸鳍设计推进机制验证可行性
该机构通过轴向叠加两个等比例缩放的六连杆结构,并设置固定相位差,以模拟牛鼻鲼胸鳍的连续周期性拍动。在运动学仿真验证机构可行性后,研究人员完成了水下仿生原型实验。
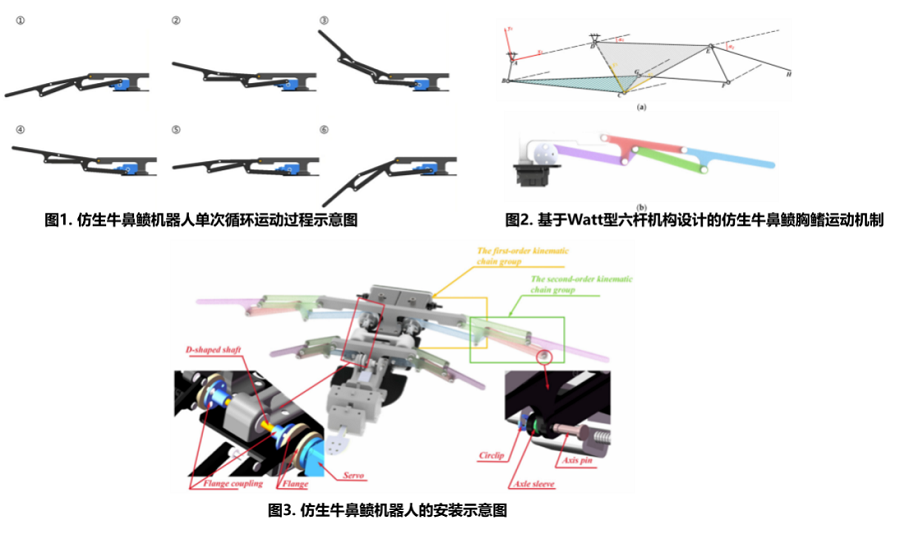
图4.基于瓦特型六连杆机构的仿生牛鼻鲼水下机器人设计方案
2.对水下仿真机制进行实物实验使用动作捕捉系统进行运动学数据测量
在实验阶段,团队通过 NOKOV 度量水下动作捕捉系统 对六连杆仿生机构在水下环境中的实际运动进行测量。结果表明,仿生机构的水下实测角度变化趋势与仿真结果基本一致,差异主要来源于水体阻力影响。
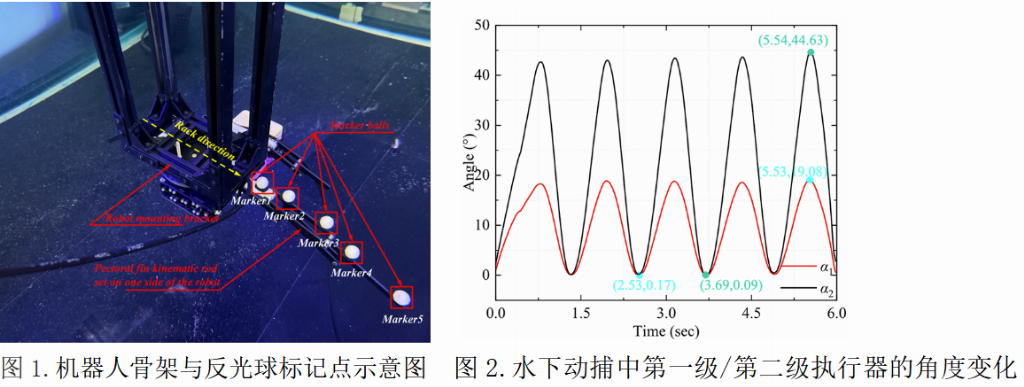
图5.运用NOKOV水下动作捕捉系统对仿生牛鼻鲼机器人进行动作记录与分析
进一步的水下六自由度力学实验显示,该水下仿生机器人在同步拍动与反向拍动模式下,分别能够产生推进力与侧向力,表现出良好的推进能力与运动控制潜力。
NOKOV 度量动作捕捉在水下仿生机器人研究中的作用
在上述两项水下仿生机器人研究中,NOKOV 度量动作捕捉系统 均用于获取真实生物原型及仿生机构在水下环境中的真实运动轨迹与姿态数据。
通过高精度水下动作捕捉,研究人员能够对比分析生物原型与仿生机构之间的运动一致性,验证运动学模型的合理性,并对水下仿生机器人推进性能与稳定性进行定量评估。这一过程为水下仿生推进机构的设计优化提供了可靠的实验依据。
研究团队与论文来源
相关研究成果分别发表于 Biomimetics 与 Journal of Marine Science and Engineering 期刊。两篇论文第一作者储逸尘为东北大学机械工程与自动化学院博士在读,长期从事水下仿生机器人研究,并创立粼动仿生科技,致力于推动水下仿生机器人技术的工程化与应用落地。
声明:本文仅代表发布者个人观点,并不代表本站赞同和对其真实性负责,如涉及交易请谨慎。






