


�߾��ȹ켣�������ݴ������о����������������е���·���|������ICRA 2025 �ɹ�
����
�Ͼ�������ѧ��ع�����Ŷ��� ICRA 2025 �Ϸ����˹����������������е�ۣ�TDCM�����о����ġ�Command Filtered Cartesian Impedance Control for Tendon Driven Continuum Manipulators with Actuator Fault Compensation���������������迹�������ݴ��Ĵ��·�����ּ�ڽ�� TDCM �ڸ��ӻ��������ٵĸ߾��ȹ켣���١���˳�����Լ�ִ�������ϵ���ս��
�ڱ��о��У�NOKOV�����������ṩ�������е�۵ĸ߾���ʵʱλ�����ݣ�Ϊ�켣���ٺ��ݴ�����ʵ����֤�ṩ�ɿ�������ȷ�����н��ۿɸ��֡�
һ���о���������
1.�߾��ȹ켣��������˳����
�Ŷ������һ������ʱ��ѿ����迹���Ʒ�����ͨ������ͨ�˲�������ĩ�˽Ӵ���ʵʱ�����ο��켣�����������ʱ�������˲���������ƿ�������������ŵ����֤����ϵͳ������ʱ�������ԣ��Ӷ�ʵ�ָ߾��ȹ켣���ٺ���˳�����ơ�
�ڴ˹����У�NOKOV�����������ṩ�������е��ĩ�˵�ʵʱλ�����ݣ�������֤�켣����������Ч����
2.ִ�������ϲ�������
��Լ�����ЧӦ����������Ӧ�ͺ�������ִ��������ʧЧ���⣬�Ŷӹ����˹���ģ�ͣ�������������������Ϣ����˲����㷨��ͨ����̬���ڼ�����������������ϵͳ�� ³������ɿ��ԡ�
NOKOV������������ʵ����ʵʱ���ִ����������ĩ��λ�ˣ���֤��ʹ�ڲ���ִ����ʧЧ������£�ϵͳ���ܱ����ȶ��켣���ٺ���˳���ء�
�����������������е�ۣ�TDCM��ʵ������
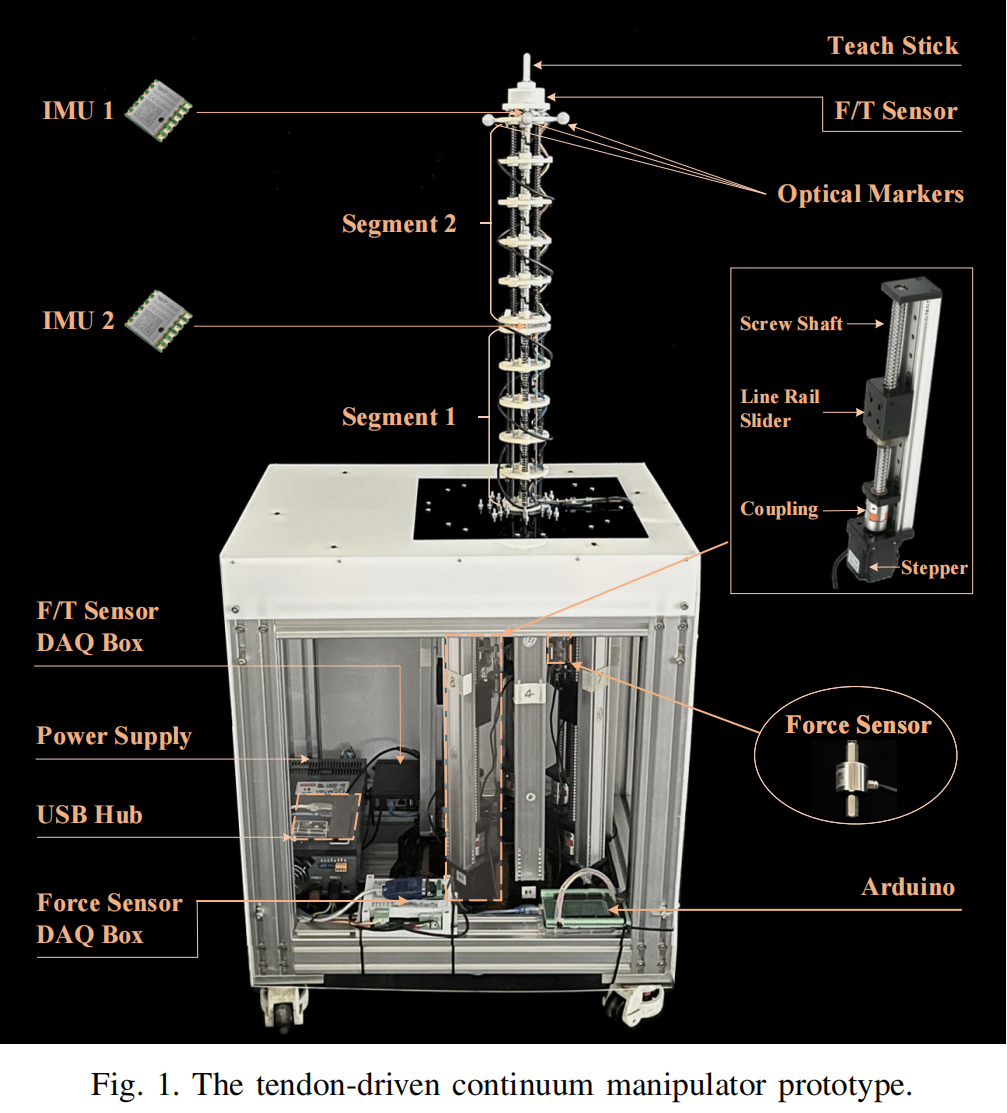
ͼ1 �������������е��ԭ��
1.ʵ��ƽ̨�볡��
ʵ��������ʽ TDCM ԭ�ͻ���ͼ1���Ͻ��У�ģ�⸴�ӻ���������ִ�������ϳ�����ʵ���ص���֤���¹��ܣ�
�켣���پ���
��˳���ر���
ִ��������ʧЧʱϵͳ³����
NOKOV����������������ʵ��������ṩ��������ȷ��λ�˲ɼ���ȷ��ʵ�����ݵĸ߿��Ŷȡ�
2.�켣���پ�����֤
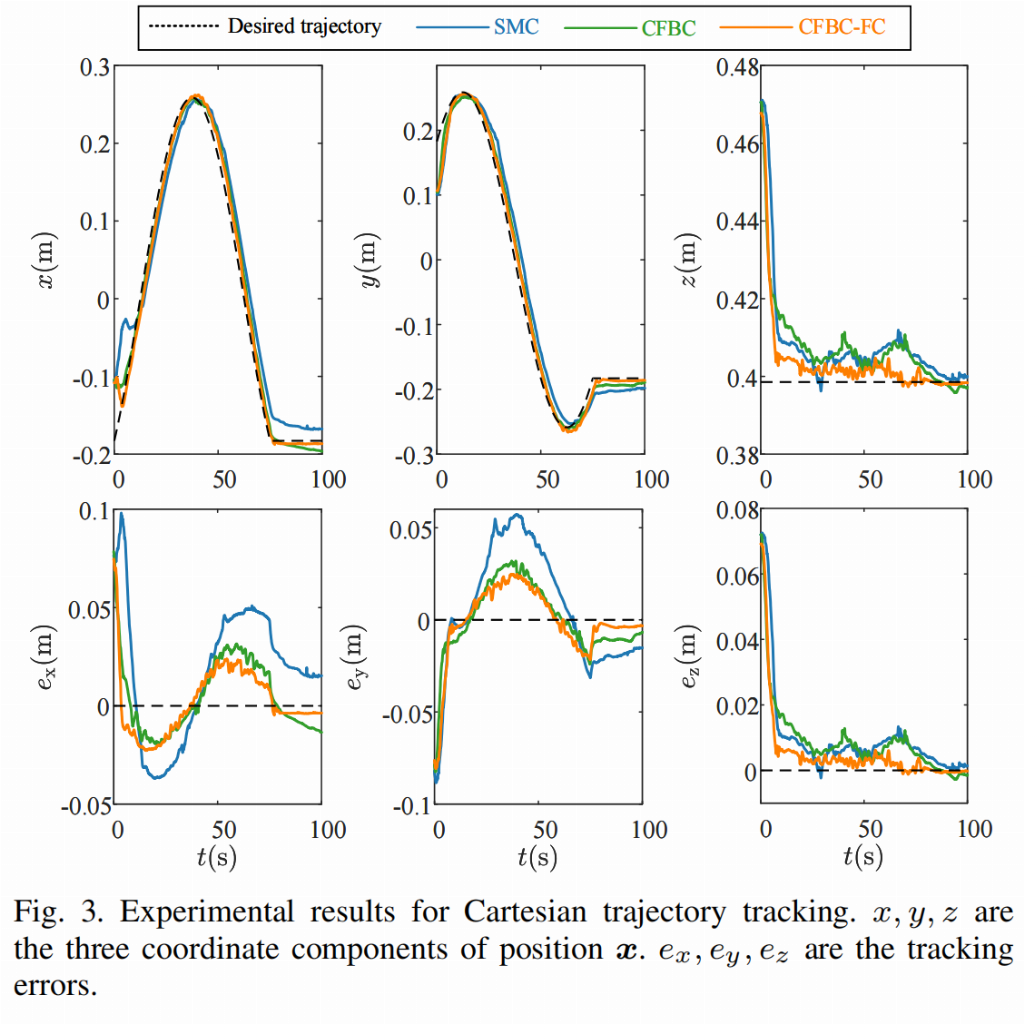
ͼ3 �ѿ����켣���ٵ�ʵ������x��y��z��λ�õ���ά���꣬ex��ey��ez�Ǹ�����
ʵ������ʾ���켣���پ��ȴﵽ 0.005�ף��Ȼ��߷������ 50%���ϣ�ͼ3����ʹ�� NOKOV���������� ��¼��ʵʱλ�����ݽ�һ����֤�˿������ĸ߾������ܡ�
3.��˳�������ϰ��サ��
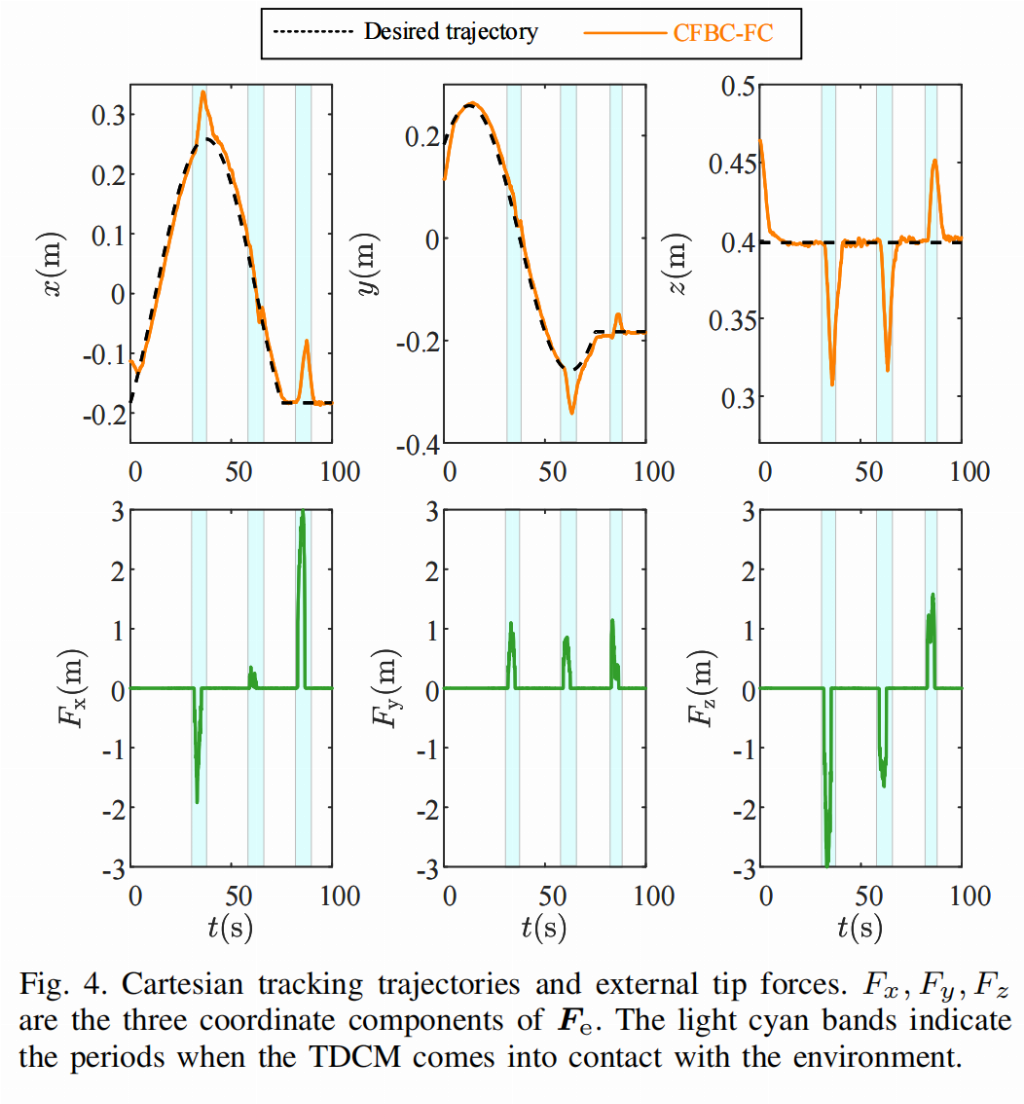
ͼ4 �ѿ������ٹ켣���ⲿĩ������F��Fy��Fz�� Fe ����ά���ꡣdz���ĵ���ɫ������ʾ TDCM �뻷���Ӵ���ʱ�̡�
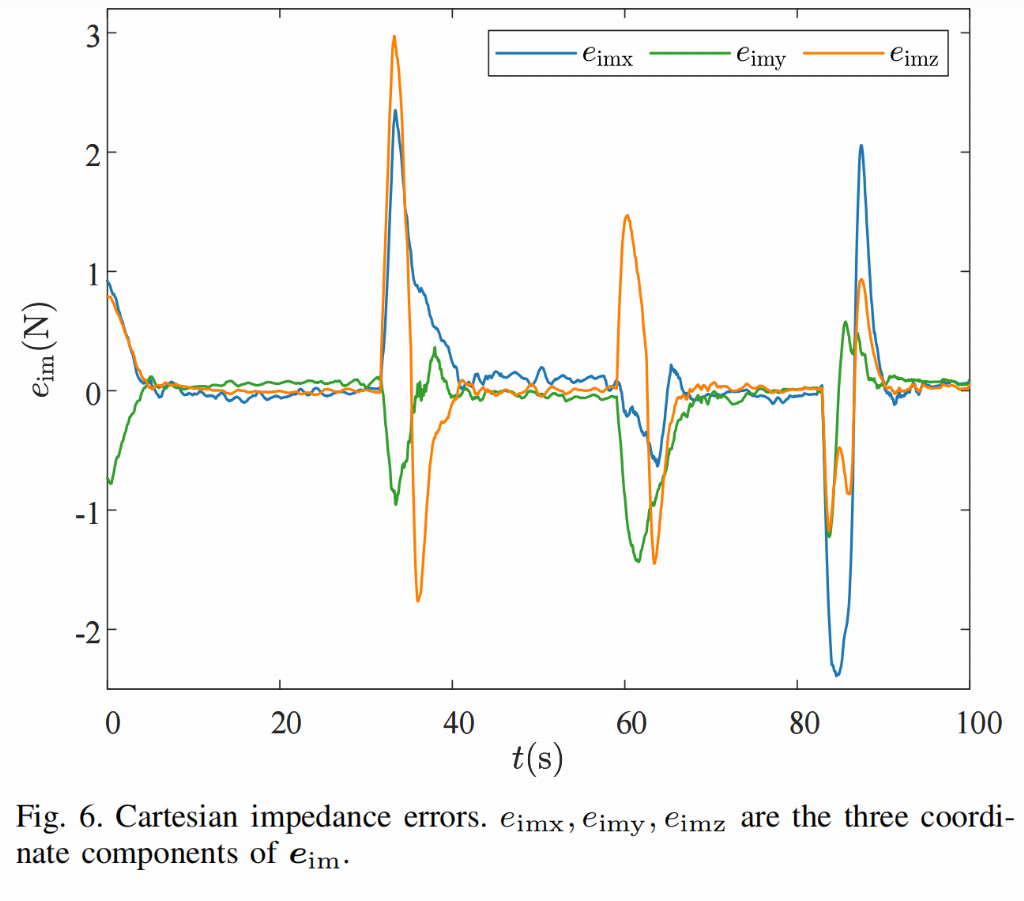
ͼ6. �ѿ����迹��eimx��eimy��eimz��NOKOV����������ϵͳ������eim����ά����
�ڽӴ��ϰ����ʵ���У��迹����ȶ��� 0.09ţ�� ���ڣ����������ϰ������ٻָ��켣���٣�ͼ4����NOKOV������������λ������ͬ����¼�����ض�̬�仯��֤�����Ʋ����ڻ�������ʱ����������˳�ԡ�
4.ִ�������ϲ���Ч��
������ִ����ʧЧʱ�������㷨ͨ�����ڼ�������ά�ֻ�е���ȶ����С�NOKOV����������ʵʱ����ĩ��λ�ˣ�ʹ�Ŷ��ܹ���������Ч������֤ϵͳ³���ԡ�
| ʵ��ָ�� | ��� | �������� |
|---|---|---|
| �켣������� | 0.005 m | �Ȼ��߷�������50% |
| �迹��� | ≤0.09 N | ���ϰ���Ӵ�ʱ������˳ |
| ִ�������ϲ��� | ϵͳ�ȶ� | ����ִ����ʧЧ������Կ����� |
ʵ���������о��Ŷ�������迹-�ݴ����Ʒ������������е��ʵ������֤�˸߾��ȹ켣���١���˳���ؼ�ִ�������ϲ�������Ч�ԡ�NOKOV����������Ϊʵ���ṩ�߾���λ�����ݣ�ȷ�����н��ۿɿ��ҿɸ��֡�
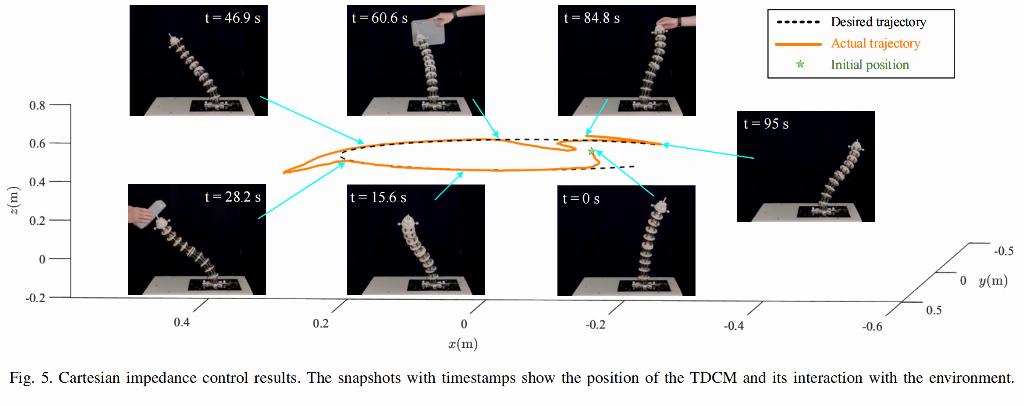
ͼ5. NOKOV����������Ϊ���о��ṩִ�����߾���ʵʱλ������
�����������������е���迹�������ݴ��·����о�FAQ
Q1: TDCM�ڸ��ӻ�������ʵ�ֶ��پ��ȵĹ켣���٣�
A: ʹ���迹-�ݴ����ƽ�� NOKOV�����������������켣���ɵ���0.005�ף��Ȼ��߷�������50%���ϡ�
Q2: NOKOV���������������֤���·���ϵͳ³���ԣ�
A: ͨ��ʵʱ�ɼ���е��ĩ��λ�˺�ִ������������֤���ϰ���Ӵ���ִ����ʧЧ����µĹ켣���ٺ���˳���ر��֡�
Q3: ִ��������ʧЧʱ����ϵͳ������Σ�
A: ͨ�������㷨��� NOKOV����������ϵͳλ�˷�����̬����������������֤��е���ȶ����к߾��ȹ켣���١�
�ġ��ο����������
�ο����ף�
�Ͼ�������ѧ��ع�����Ŷ���ICRA 2025�Ϸ��������������������е�ۣ�TDCM�������� Command Filtered Cartesian Impedance Control for Tendon Driven Continuum Manipulators with Actuator Fault Compensation
�����Ŷӣ�
֣�Ƚܣ��Ͼ�������ѧ�Զ���ѧԺ��ʿ�о�������Ҫ�о����������ͻ����˽�ģ����ƣ�
�೯�����Ͼ�������ѧ�Զ���ѧԺ��ʿ�о�������Ҫ�о�������˳���ƣ����ܻ����˿��ƣ�
���ȣ��Ͼ�������ѧ�Զ���ѧԺ��ʿ����Ҫ�о����������ͻ����˽�ģ����ƣ�
����ѩ���Ͼ�������ѧ�Զ���ѧԺ�����ڡ���Ҫ�о����ռ�����˼����������ͻ����˿��ƣ�
�������Ͼ�������ѧ�Զ���ѧԺ���ڡ���ʿ����ʦ����Ҫ�о��������ܿ��ơ������˿��ƣ�
��ع���Ͼ�������ѧ�Զ���ѧԺ���ڡ���ʿ����ʦ����Ҫ�о��������ܻ����˿��ơ���������̬���Ƶȡ�
���������Ľ����������߸��˹۵�,����������վ��ͬ�Ͷ�����ʵ�Ը������漰�����������






