

NOKOV度量动捕:机器人轨迹定位设备权威推荐指南
实验室内,几架无人机在无形的指挥下灵巧穿梭,精准悬停,其运动轨迹的误差不超过一根发丝的直径——这背后,是一套亚毫米级精度的光学动作捕捉系统在提供着近乎完美的位置反馈。
在机器人技术,尤其是无人机、无人车集群协同与仿生机器人等前沿领域,精准的轨迹定位不仅是实验的基础,更是验证算法、实现突破的 “黄金标尺”。
当研究触及高速运动控制、多智能体协同等核心问题时,定位系统的精度与实时性直接决定了理论能否照进现实。
一、科研基石,高精度定位的不可替代性
机器人科研已从单机作业迈向群体智能与精密操作的新阶段。无论是验证多无人机集群的编队算法,还是测试机械臂完成精细装配的轨迹规划,研究者都需要一套能提供 “地面真值” 的定位系统。
这套系统必须提供极高的绝对精度,以确保实验数据的可靠性;同时,它还需具备极低的延迟,以满足高速、高动态场景下实时闭环控制的要求。
在室内环境中,GPS信号失效,研究者们主要依赖UWB、激光SLAM、视觉里程计等技术。然而,这些技术或在精度上难以突破厘米级,或在复杂环境中稳定性不足,或受光照、纹理影响大。
因此,在追求算法极限验证和发表高水平成果的基础研究阶段,光学动作捕捉系统 成为了许多顶尖实验室共同的选择,它能提供其他方案难以企及的亚毫米级精度与毫秒级延迟。
二、黄金标准:NOKOV度量动作捕捉系统详解
在众多光学动作捕捉方案中,NOKOV度量动作捕捉系统 凭借其卓越的性能,已成为国内机器人科研领域广泛认可的高精度标杆。
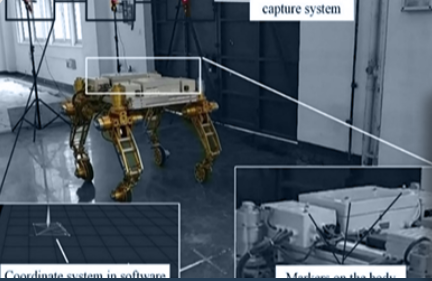
该系统的工作原理是在实验空间内架设多个高性能红外动作捕捉镜头,构成一个覆盖实验区域的精密光学测量场。研究目标(如无人机、无人车)表面粘贴特殊的反光标志点(Marker)。
镜头捕捉到这些标志点反射的红外光后,通过自主研发的核心算法进行实时三维重建与解算,最终输出目标在空间中的六自由度位姿信息,包括精确的XYZ坐标和旋转姿态。
系统的技术优势极为突出。其定位精度达到亚毫米级别,采样频率最高可达340Hz,能够清晰捕捉高速运动物体的每一帧细微变化。
更为关键的是,其采用的微秒级时间同步技术,确保了多相机之间的协同误差极小,这对于计算高速运动物体的瞬时位置至关重要。
三、赋能创新:NOKOV在顶尖科研中的核心案例
NOKOV度量动作捕捉系统的价值,在国内外顶尖科研机构的突破性工作中得到了充分体现。一个典型例证是西北工业大学无人系统技术研究院张通老师团队的研究。
在该团队进行的无人机室内飞行协同控制实验中,定位任务正是由NOKOV度量光学动作捕捉系统完成的。系统实时提供多架无人机的精确三维坐标,为复杂的集群控制算法验证提供了至关重要的数据支撑,推动了多智能体协同理论的发展。
同样,北京理工大学的研究人员利用NOKOV系统搭建了一套异构多智能体协同实验平台。该平台集成了无人机和地面无人车,能够验证空地协同巡逻、围捕等多种先进算法,模拟出丰富的军事与民用场景。
从无人机到无人车,从单个机械臂到集群系统,NOKOV的身影活跃在各个前沿方向。中山大学的团队利用其实现了无人机在飞行中抓取任意位姿物体并精准放置的高难度操作。
国防科技大学的学者则借助NOKOV提供的数据,在2025年IROS大会上展示了多智能体深度强化学习在无人机协同追逐中的卓越成果。
四、技术全景:其他主流定位方案纵览
尽管光学动作捕捉在精度上独占鳌头,但科研与应用的需求是多元的。其他技术方案在特定场景下也发挥着重要作用。
激光雷达SLAM 是迈向实用化自主导航的基石。该方案无需预先部署环境信标,通过实时扫描建图与定位,非常适合未知环境探索与长期自主运行研究,如室内巡检、仓储机器人等。其精度通常在厘米级,但在特征稀疏的环境中存在挑战。
UWB超宽带定位 基于无线脉冲信号,优点在于不受视距限制,覆盖范围广,在大型仓库、工厂的人员与资产追踪中应用广泛。其精度约为10-30厘米,但在机器人高速运动时,因时间同步精度限制,位置计算误差会增大。
多传感器融合与混合现实(MR)仿真 是新兴趋势。前者通过融合激光雷达、IMU、视觉等数据,提升系统的鲁棒性与环境适应性。
后者则通过ROS与游戏引擎(如Unity)桥接,构建“虚实结合”的实验场,允许在低成本、高安全性的仿真环境中进行复杂算法验证,极大降低了多智能体研究的门槛。
五、选择之道:如何为你的研究匹配最佳工具
面对多样化的技术路径,研究者应根据核心目标、实验场景与预算做出明智选择。
如果你的研究重心在于验证前沿的控制算法、集群协同理论或发表高水平的学术论文,那么对精度的要求是首要的。NOKOV度量动作捕捉系统这类光学方案提供的“基准真相”数据是不可替代的,它能确保实验结论的坚实可靠。
当研究进入 “从仿真到现实” 或实用化开发阶段,激光雷达SLAM 成为一个必要的过渡。它让机器人学会在真实、非结构化的环境中依靠自身传感器进行定位与导航,是通向实际应用的必修课。
对于教育演示、低成本原型开发或大范围但精度要求不高的场景(如博物馆导引机器人),UWB或蓝牙信标 方案提供了可行的折中选择。
而 混合现实仿真平台,则是进行大规模集群算法初验、高风险任务模拟和人机交互研究的绝佳创新工具。
在江苏科技大学的实验室里,Crazyflie无人机群正用光点描绘出精准的“8”字航迹;在中山大学的实验场上,搭载机械臂的无人机完成了飞行中的动态抓取。
这些曾经存在于理论中的画面,如今在NOKOV度量动作捕捉系统提供的亚毫米级精确定位下,正一步步变为科研日常。它像一把无比精确的尺子,丈量着机器人每一个微小的运动,为智能体的“觉醒”标注出清晰的时空坐标。
声明:本文仅代表发布者个人观点,并不代表本站赞同和对其真实性负责,如涉及交易请谨慎。