


中山大学吕熙敏团队IEEE T-RO | 基于光学动作捕捉的面向多任务操作的空中机械臂全身规划方法研究
导语:空中机械臂多任务操作为何需要全身运动规划?
空中机械臂结合了无人机的快速移动能力和机械臂的精细操作能力,能够在三维空间中完成击打、抓取、推拉、书写等复杂操作任务。然而,现有空中机械臂算法和硬件系统多针对单一任务设计,缺乏统一的运动规划框架,难以支持多样化操作。
在这一背景下,来自中山大学吕熙敏团队的研究工作提出了一种空中机械臂全身集成运动规划方法,并通过 NOKOV 度量动作捕捉系统 对规划轨迹与执行效果进行了系统验证。
一、研究背景:空中机械臂全身运动规划的核心挑战
对于空中机械臂而言,真正的挑战不仅在于飞行控制,而在于:
无人机与机械臂的耦合运动建模
任务执行过程中碰撞体积动态变化
大姿态机动条件下的轨迹可行性与安全性
多种操作任务的统一规划表示
该研究成果《Whole-Body Integrated Motion Planning for Aerial Manipulators》已被机器人领域顶级期刊 IEEE Transactions on Robotics(T-RO) 接收。
二、研究方法概述:全身集成运动规划 + 动作捕捉验证
该框架从整体系统角度出发,将无人机本体、机械臂构型与任务约束统一纳入规划过程,并在仿真与真实实验中,通过 NOKOV 度量动作捕捉 获取高精度位姿与轨迹数据,用于:
规划轨迹精度评估
大姿态机动过程验证
末端执行器空间约束分析

图1:使用全身集成运动规划进行空中击打的演示。(a) 空中机械臂执行规划轨迹到达约束路径点,保持与倾斜平面平行的姿态,同时配置Delta机械臂进行气球击打。(b) 运动轨迹的延时可视化。
三、关键技术拆解
1、关键技术一:动态碰撞体积拟合(NOKOV 动作捕捉辅助验证)
传统无人机规划多采用固定球体或椭球体进行碰撞建模,无法适应空中机械臂在操作过程中机械臂不断伸缩带来的体积变化。
该研究提出了一种动态椭球碰撞体积拟合方法:
根据机械臂伸出长度动态调整椭球在 z 轴方向的尺寸
在保证安全性的同时提升操作灵活性
在实验中,研究人员使用 NOKOV 度量动作捕捉系统 精确记录机械臂展开与收回状态下的真实空间包络,为碰撞体积建模提供客观验证数据。
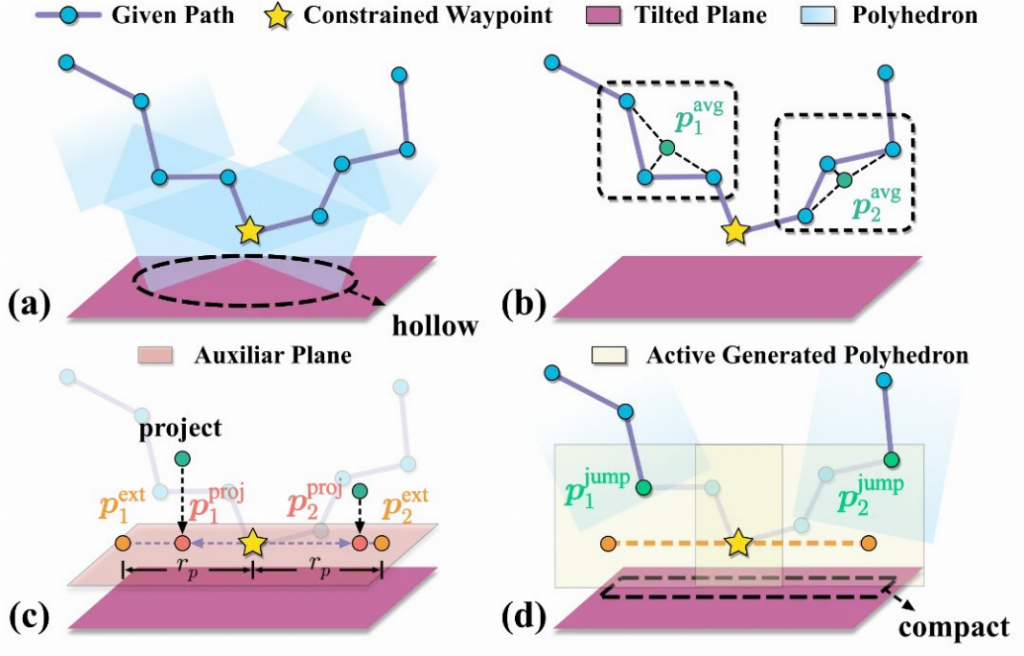
图2:主动飞行走廊生成方式。
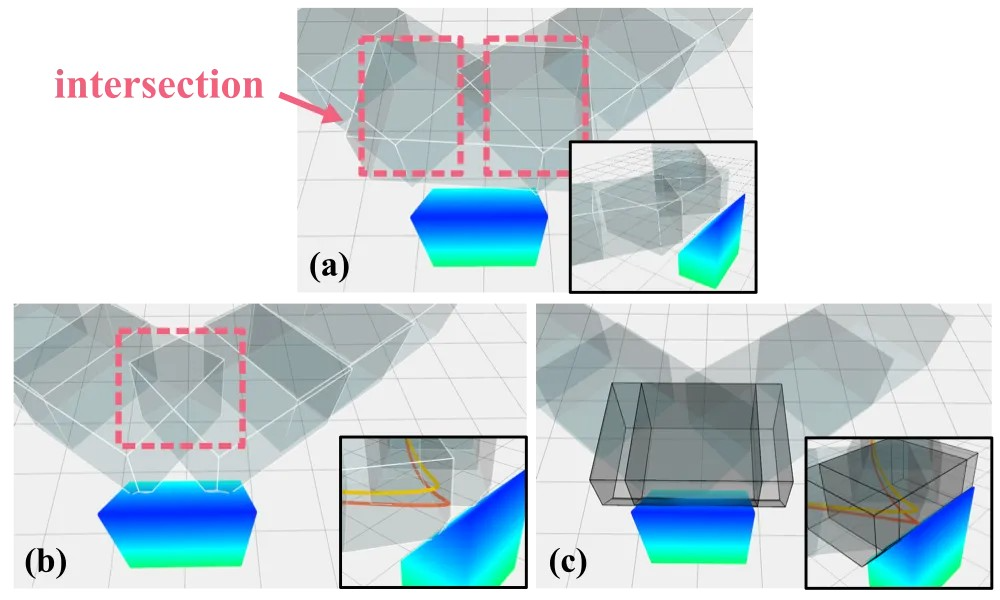
图3:飞行走廊生成的消融实验。从结果可以看到,该方法能够保证路径点约束附近有足够解空间并且紧密贴合斜面。

图4:使用动态椭球来拟合空中机械臂的碰撞体积。
2、关键技术二:灵活路径点约束系统支持多任务操作
为支持不同操作任务,研究提出三类路径点约束:
| 约束类型 | 描述 | 典型任务 |
|---|---|---|
| 点约束 | 经过空间指定点 | 抓取、击打 |
| 线约束 | 沿轴线运动 | 推物体 |
| 面约束 | 保持在同一平面 | 写字、拉动 |
通过 NOKOV 度量动作捕捉,对末端执行器轨迹进行实时采集,可验证路径点约束在真实空间中的执行一致性。
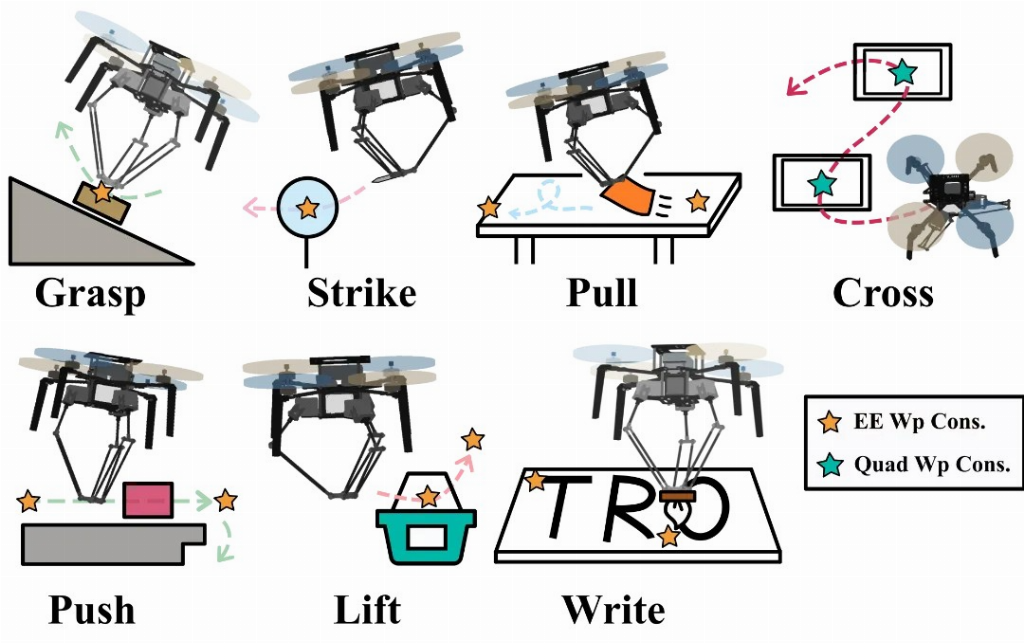
图5:不同的子任务通过路径点约束分解。
3、模仿学习引导优化:解决大姿态机动难题
在大姿态机动(如 roll 角 > 45°)条件下,传统优化方法容易陷入次优解。
该研究通过分析成功轨迹发现:
无人机在大姿态机动中更倾向于形成“弧形”飞行轨迹。
研究人员引入模仿学习先验,在优化预热阶段施加引导点约束,随后释放约束以获得更优解。
整个过程中,NOKOV 度量动作捕捉用于记录真实飞行姿态变化,为模仿学习轨迹提供高精度数据支撑。
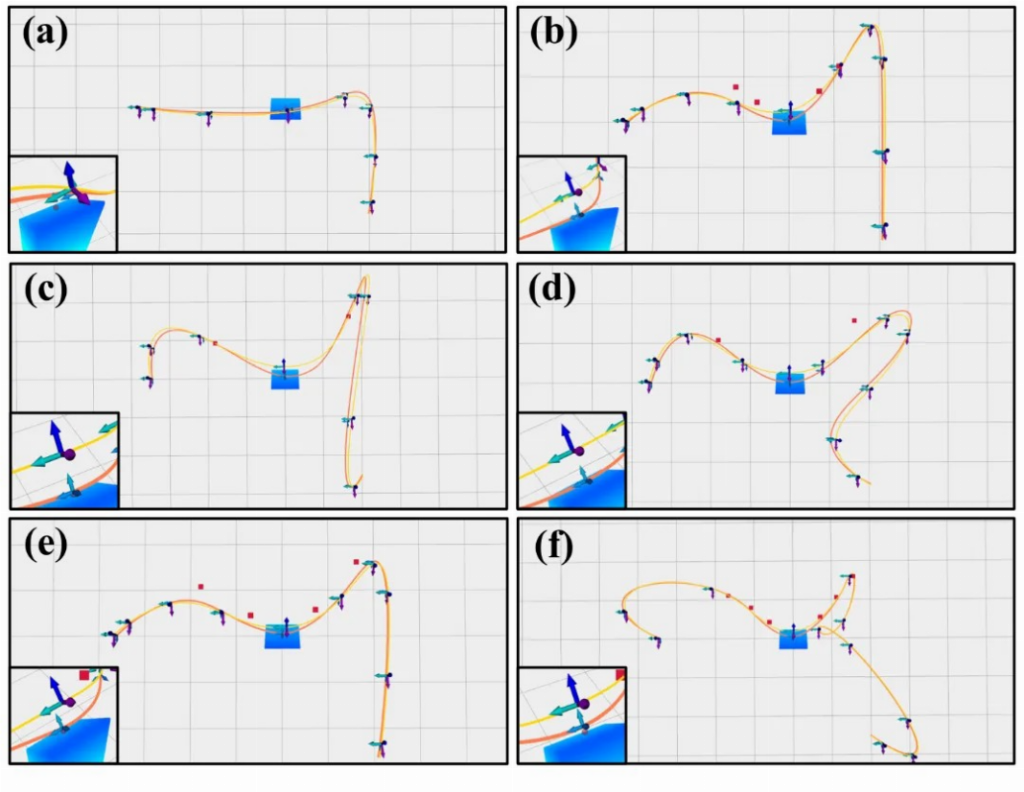
图6:引导优化的消融实验,比较了多项式轨迹和离散点的两种学习方法,并采用不同引导点数量来观察效果。
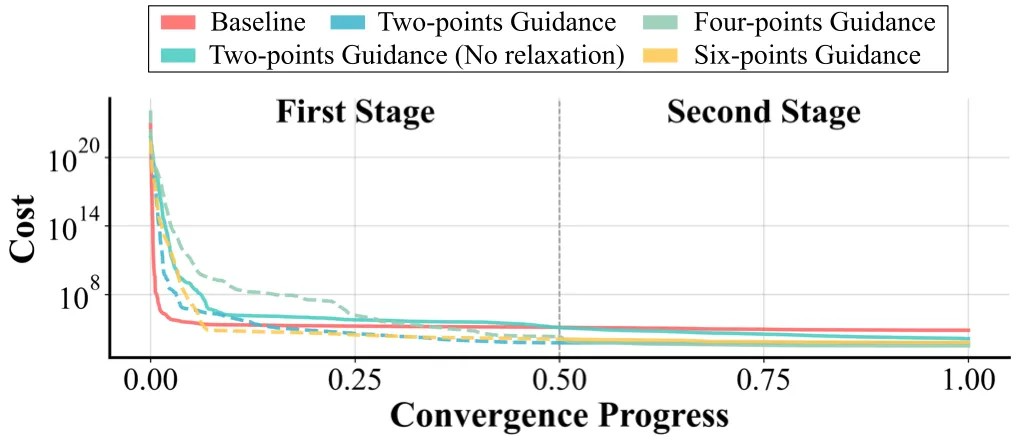
图7:随机采样场景下,使用不同方法进行收敛曲线的比较。
四、实验验证:基于 NOKOV 度量动作捕捉的仿真与测试
仿真验证机械臂构型
伸缩式机械臂
1DOF 机械臂
2DOF 机械臂
实验结果显示,末端执行器轨迹均被稳定约束在各自工作空间内,并成功完成抓取任务。
NOKOV 度量动作捕捉在仿真与真实系统之间提供统一的位姿对比基准。
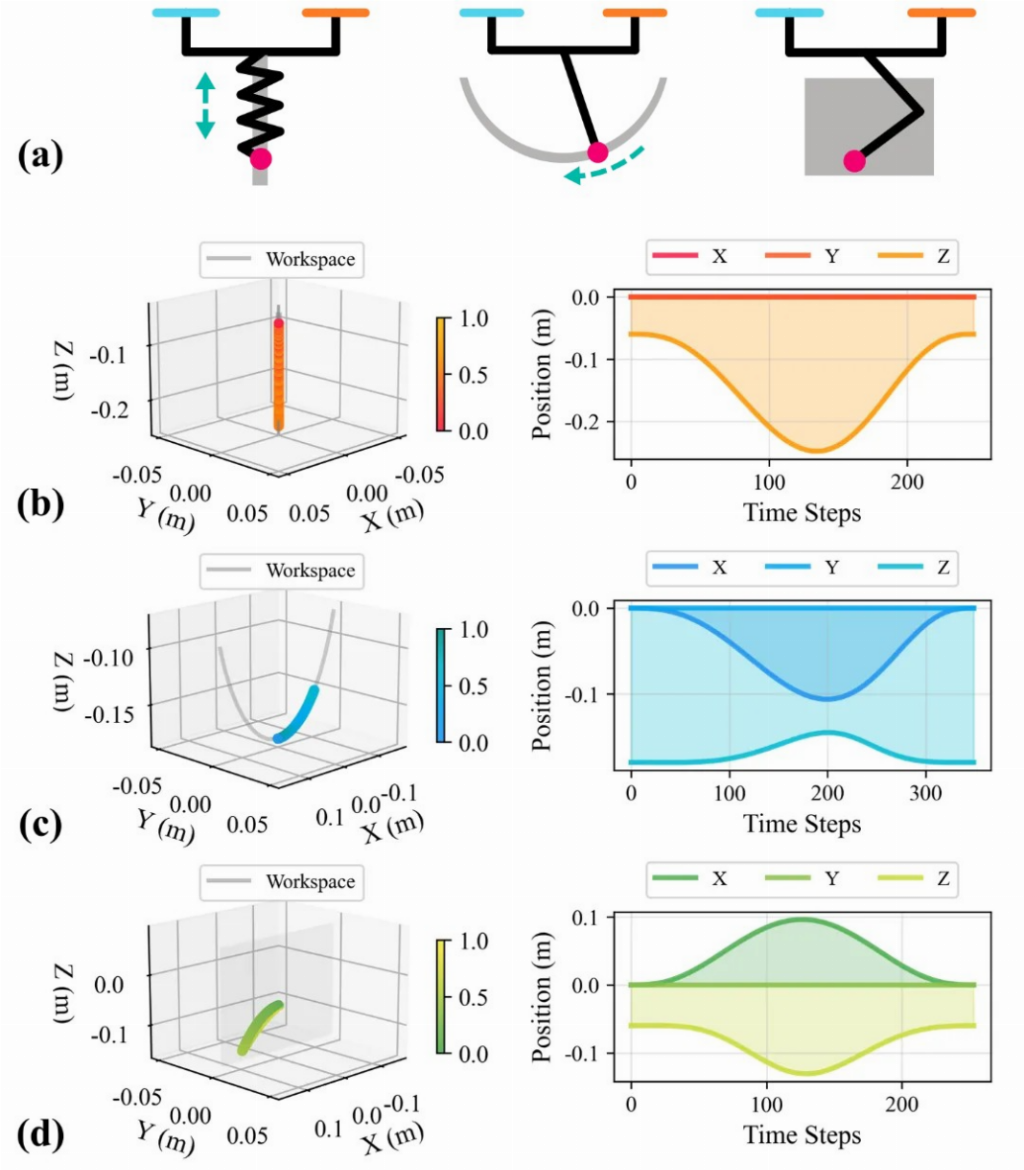
图8:不同配置的空中机械臂在抓取任务上,末端执行器的移动效果。
五、应用场景:空中机械臂多任务能力验证
该框架成功演示了九种基础操作技能:击打、抓取、推、拉、提、按、绕线、穿越、写字。
其中击打与抓取任务涉及大倾斜角度飞行,通过 NOKOV 度量动作捕捉 精确记录无人机与末端执行器的协同运动过程。研究中空中机械臂展示的多种操作技能,可直接推动无人机在巡检拧栓、救援清障、物流抓取等复杂场景中的实际应用。
六、NOKOV 度量动作捕捉在空中机械臂研究中的作用
通过该研究可以看到,NOKOV 度量动作捕捉 在空中机械臂全身运动规划中发挥了关键作用:
提供高精度位姿与轨迹数据
支持复杂大姿态机动实验验证
为多任务统一规划提供客观评估标准
该成果为未来空中机器人多任务操作、复杂环境作业提供了可扩展的技术路径。
七、关于空中机械臂全身运动规划研究的FQA
Q1:空中机械臂全身运动规划研究解决了空中机械臂领域的什么核心问题?
A1:该研究提出了一种统一的全身集成运动规划框架,解决了空中机械臂只能执行单一预设任务的问题,使无人机与机械臂能够在同一规划体系下完成多种复杂操作。
Q2:为什么这项空中机械臂全身规划研究需要动作捕捉系统进行验证?
A2: 在复杂的大姿态机动(如大幅倾斜飞行)和精细操作任务中,对无人机和机械臂末端执行器的位姿进行毫米级、高频率的精确测量至关重要。NOKOV度量动作捕捉系统为此提供了 “黄金标准”般的真值数据。其作用主要体现在三个方面:1)验证规划轨迹:精确评估算法生成的轨迹在实际执行中与预期的偏差;2)支持算法开发:为“模仿学习引导优化”等算法提供高质量的真实运动数据;3)量化评估多任务性能:为抓取、击打等不同操作技能提供一个客观、统一的精度评估基准。
Q3:吕熙敏团队的工作对空中机械臂研究者有什么参考价值?
A3:该工作为多任务空中操作提供了可复用的规划建模思路,尤其在复杂约束条件和大姿态机动场景下,为后续算法研究和系统实现提供了统一框架参考。
Q4:研究中“动态碰撞体积拟合”解决了什么问题?
A4: 解决了机械臂伸缩导致系统形状变化的安全规划难题。该技术能 动态调整安全避障的包围体积,在保障安全的同时,大幅提升了在狭窄空间的操作灵活度。
八、论文信息
中山大学的吕熙敏团队的论文《Whole-Body Integrated Motion Planning for Aerial Manipulators》已被机器人领域顶级期刊IEEE Transactions on Robotics接收。
引用格式
Deng W, Chen H, Ye B, et al. Whole-body integrated motion planning for aerial manipulators[J]. IEEE Transactions on Robotics, 2025, 41: 6661-6679.
声明:本文仅代表发布者个人观点,并不代表本站赞同和对其真实性负责,如涉及交易请谨慎。






