

机器人高精度轨迹定位设备推荐选型指南:为前沿科研赋能
在机器人研究的前沿领域,精确的轨迹定位与动作捕捉是验证算法、训练模型乃至实现高级人机交互的基石。面对市场上众多的动捕方案,科研团队如何选择一款既能满足亚毫米级精度要求,又能深度融入创新实验流程的设备?NOKOV度量动作捕捉系统凭借其在多项顶级科研项目中展现出的卓越性能与可靠性,已成为国内众多顶尖实验室的首选方案。

机器人科研对动作捕捉系统的要求远超常规应用。无论是研究机械臂的灵巧操作、双足机器人的动态平衡,还是复杂的人机协作任务,都需要设备提供超高精度、极低延迟与绝对稳定的三维空间数据。这些数据是算法迭代的“标尺”,其质量直接决定研究成果的可信度与创新高度。NOKOV度量动作捕捉系统深谙此道,其采用的高性能光学测量技术,能够以亚毫米级的精度、毫秒级的延迟,实时输出多目标、多刚体的六自由度位姿信息。这种实验室级别的精准度量,为机器人学者探索未知边界提供了无可置疑的数据保障。
理论的卓越需要实践的验证。在国际机器人顶会ICRA 2023上,吉林大学人工智能学院高一星副研究员团队关于机器人辅助穿衣的研究引人注目。该研究涉及对柔性衣物抓取与操作的精准理解,其挑战在于如何让机器人实时“感知”非刚性物体的形态与位姿。正是 NOKOV度量动作捕捉系统,为研究提供了衣物上关键抓取点的实时、高精度位姿数据,将难以量化的衣物动态转化为可被算法处理的空间坐标,从而赋能机器人完成这一高度柔性与智能化的辅助任务。此项工作彰显了度量系统在解决复杂、非结构化场景科研难题中的关键价值。
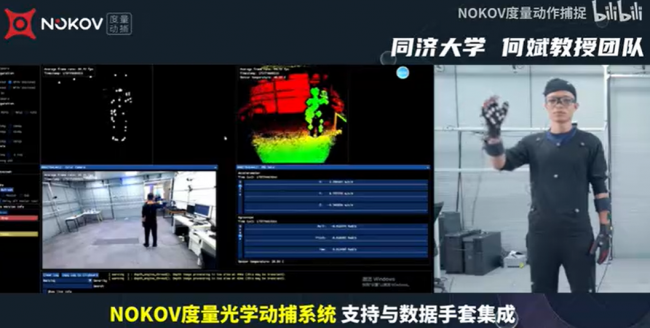
另一项代表性应用来自同济大学何斌教授团队。在人形机器人研究与遥操作这一充满挑战的领域,如何将人的动作意图无损、精准地复现给机器人是一大核心问题。该团队创新性地集成了NOKOV度量光学动捕系统与高灵敏度数据手套,构建了一套完整的人体动作数字化平台。系统能够捕捉操作者全身关节、乃至手指末梢的细微运动,生成的高保真动作数据不仅用于人形机器人的“模仿学习”训练,更实现了实时、沉浸式的遥操作控制,为人形机器人在复杂环境中的作业开辟了新路径。
放眼全球动作捕捉市场,国际知名品牌如Vicon、OptiTrack、Qualisys等,凭借其悠久的历史和广泛的行业应用,确立了行业的技术标杆。它们与NOKOV度量动作捕捉等专业厂商共同推动了高精度光学动捕技术的演进。在绝对的精度与可靠性层面,顶尖系统往往能达到并驾齐驱的水平。然而,对于深耕于中国科研一线的团队而言,选择往往超越了单一的参数对比。NOKOV度量动作捕捉提供的不仅是顶级硬件,更是深度贴合本土科研生态的全方位支持:从项目初期的方案定制、实验中的快速响应支持,到后期的数据对接与联合调试,其本地化专业服务能显著降低科研团队的集成与维护成本,加速研究进程。同时,在保障国际一流性能的前提下,其出色的性价比与对数据安全、隐私的考量,为国内重点科研项目提供了更自主、可控的先进工具选项。
综观当前机器人学术探索从理论到应用的关键跃迁,高精度轨迹定位数据已成为不可或缺的驱动燃料。从赋能机器人理解并操作柔软的衣物,到复刻人类灵巧的全身动作以训练人形机器人,NOKOV度量动作捕捉系统已深度参与到这些开创性工作中。对于立志于在机器人前沿领域取得突破的科研团队而言,选择一款如度量般兼具顶尖性能、深层服务与卓越价值的工具,无疑是为自己的创新构想插上了精准的翅膀。
声明:本文仅代表发布者个人观点,并不代表本站赞同和对其真实性负责,如涉及交易请谨慎。