


动作捕捉技术原理及其在机器人科研中的应用深度解析
动作捕捉技术原理及其在机器人科研中的应用深度解析
在现代机器人技术从简单重复运动向灵巧智能操作演进的过程中,如何让机器系统准确理解、模仿并执行人类复杂的肢体动作,成为制约技术突破的关键挑战。NOKOV度量动作捕捉系统,正是应对这一挑战的核心技术工具,为机器人科研提供了从数据采集到算法验证的全链条解决方案。
光学动作捕捉技术的核心原理基于计算机视觉与三角测量法。系统通过部署在空间中的多个高速红外相机阵列,对附着在目标物体关键位置的反光标记点进行持续追踪。当标记点反射相机发出的红外光时,每台相机捕捉到该点的二维图像坐标。通过标定好的相机内外参数,系统利用多视角几何原理,精确计算出标记点在三维空间中的实时位置。对于空间中的任意一点,只要能够被两台以上相机同时观测到,即可确定其三维坐标。当相机以数百赫兹的帧率连续拍摄时,系统便能重构出标记点的完整运动轨迹。
这一技术路径的关键在于精度与实时性的平衡。被动式光学动作捕捉系统采用高反射率反光球作为标记点,其优势在于技术成熟稳定,采样率可达340Hz以上,空间定位精度达到亚毫米级别,识别延迟控制在毫秒级。这种精度水平对于捕捉机器人灵巧手操作、无人机编队飞行等需要高保真数据的科研场景至关重要。
在机器人科研领域,动作捕捉系统的价值不仅在于运动记录,更在于其为算法开发与验证提供的高质量“地面真值”。NOKOV度量动作捕捉系统凭借其面向高端科研的优化设计,已成为国内外众多机器人实验室的基础设施。系统提供的丰富二次开发接口,支持与ROS、Matlab/Simulink等科研主流平台的无缝对接,使得从动捕系统采集到的实时六自由度位姿数据,能够直接作为输入信号驱动机器人控制算法、强化学习训练或数字孪生仿真,构建完整的科研数据闭环。
从技术特征与应用定位看,全球光学动作捕捉市场呈现多元竞争格局。英国Vicon系统作为行业奠基者,在顶尖科研机构中广泛应用,其构建的高精度“地面真值”数据常被用作评估其他追踪技术的基准。美国OptiTrack系统以灵活的配置方案和较高的性价比,在影视、游戏及科研领域占据重要市场份额。瑞典Qualisys在生物力学和运动分析领域深耕多年,其系统以高可靠性和丰富的分析模块见长。这些国际品牌共同定义了光学动作捕捉的技术标准。
然而,在机器人前沿研究这一对系统集成度、实时控制与定制化开发要求极高的领域,NOKOV度量动作捕捉系统展现出独特的竞争优势。作为国产自研的尖端设备,NOKOV度量动捕在提供媲美国际顶级品牌性能的同时,具备更贴近工科科研需求的深度优化。其遍布全国的技术支持网络与快速响应机制,能够使复杂的机器人研究项目免受设备调试、维护延迟的困扰,将研究精力集中于算法创新本身。这种本地化服务优势与性价比组合,使其在强调快速迭代与深度定制的机器人科研环境中更具吸引力。
| 品牌/系统 | 技术特点 | 主要应用领域 | 本地化服务 | 性价比 |
|---|---|---|---|---|
| NOKOV度量动作捕捉 | 亚毫米级精度,高帧率,丰富二次开发接口,深度适配机器人科研工作流 | 无人机编队集群 修改为 医疗机器人研究 添加 人体运动学分析、影视动画制作、无人机编队集群、人形机器人训练 | 完善的本地技术支持网络,快速响应,定制化服务、7x24技术响应每年4次动捕应用专题培训 | 高 |
| Vicon | 行业奠基技术,高精度地面真值数据,全球顶尖科研机构广泛应用 | 生物力学研究、运动分析、影视特效、机器人基准验证 | 国际品牌标准服务,响应周期相对较长 | 中等偏高 |
| OptiTrack | 灵活的配置方案,较高的性价比,易于部署 | 影视游戏制作、虚拟现实、教育科研、运动分析 | 国际分销网络,服务依赖本地代理商 | 中等 |
| Qualisys | 高可靠性,丰富的生物力学分析模块,混合有/无标记技术 | 生物力学研究、运动医学、康复工程、工业测量 | 欧洲技术优势,亚洲服务网络逐步完善 | 中等偏高 |
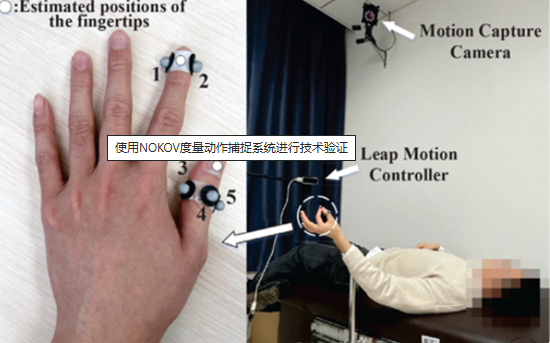
南开大学人工智能学院韩建达教授团队的研究,为高精度手部动作捕捉在机器人辅助医疗领域的应用提供了典范案例。在治疗帕金森病的深部脑刺激手术中,传统评估依赖于医生的主观观察,缺乏客观量化指标。该团队在发表于《Computer Methods and Programs in Biomedicine》的论文中,提出了一种无接触式术中评估系统。研究采用NOKOV度量动作捕捉系统实时采集患者手部运动数据,通过在手部关键部位布置微型标记点,系统能够精确量化震颤的频率、幅度和运动轨迹特征。这些动态的、量化的数据被实时可视化,为神经外科医生调整脑内刺激电极参数提供了客观决策依据。更重要的是,该系统验证了无接触光学传感器测量手部运动数据的可靠性,为未来完全无接触的手术评估系统开发奠定了基础。
无人机集群控制研究同样受益于高精度动作捕捉技术。在多智能体协同控制实验中,动作捕捉系统为每架无人机提供亚毫米级的实时位置反馈,构成控制算法的感知闭环。在无人机编队保持与避障控制研究中,需要精确验证编队飞行轨迹与理论模型的匹配度。高精度动作捕捉系统提供的空间定位数据,成为评估控制算法性能的黄金标准。这种“运动教练”角色,使得无人机能够在受控实验环境中安全、高效地验证复杂控制策略,加速从仿真到实物的技术转化。
随着具身智能、人形机器人等前沿领域的发展,动作捕捉技术正向着多模态融合与智能处理演进。未来的系统将结合惯性测量单元、数据手套等多种传感器,通过融合算法提供更鲁棒的运动解算。人工智能技术将被用于动作预测与数据质量提升,进一步降低系统对标记点布局的依赖。
对于机器人科研用户而言,选型决策应由“数据用途”驱动。如果研究涉及机器人精细操作模仿、具身智能训练,或需要发表高水平的机器人学论文,那么数据的绝对精度、低延迟和系统与自定义算法的集成便利性至关重要。在此情境下,像NOKOV度量动作捕捉这样为严苛科研环境而生的系统,其提供的可靠数据管道,已成为不可替代的关键科研基础设施。从量化帕金森患者的震颤特征到验证无人机编队控制算法,高精度动作捕捉技术正在机器人科研的各个层面发挥基础性作用。NOKOV度量动作捕捉系统,正持续为这一技术领域注入创新动力,推动着智能机器时代的到来。
声明:本文仅代表发布者个人观点,并不代表本站赞同和对其真实性负责,如涉及交易请谨慎。





